Katse Kauguse mõõtmise anduri kasutamine
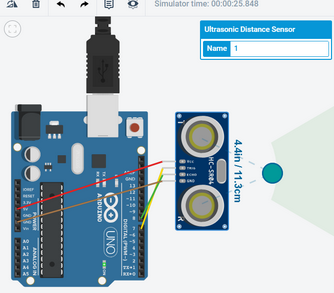
#define ECHO_PIN 8
#define TRIG_PIN 7
void setup() {
pinMode(ECHO_PIN, INPUT);
pinMode(TRIG_PIN, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(TRIG_PIN,HIGH);
digitalWrite(TRIG_PIN,LOW);
int distance=pulseIn(ECHO_PIN, HIGH)/50;
Serial.println(distance);
}
—————————————————————————————————————
#define ECHO_PIN 8
#define TRIG_PIN 7
void setup() {
pinMode(ECHO_PIN, INPUT);
pinMode(TRIG_PIN, OUTPUT);
Serial.begin(960);
}
void loop() {
Serial.println(measure());
}
int measure()
{
digitalWrite(TRIG_PIN,HIGH);
digitalWrite(TRIG_PIN,LOW);
int distance=pulseIn(ECHO_PIN, HIGH,15000)/50;
return constrain(distance,1,300);
}
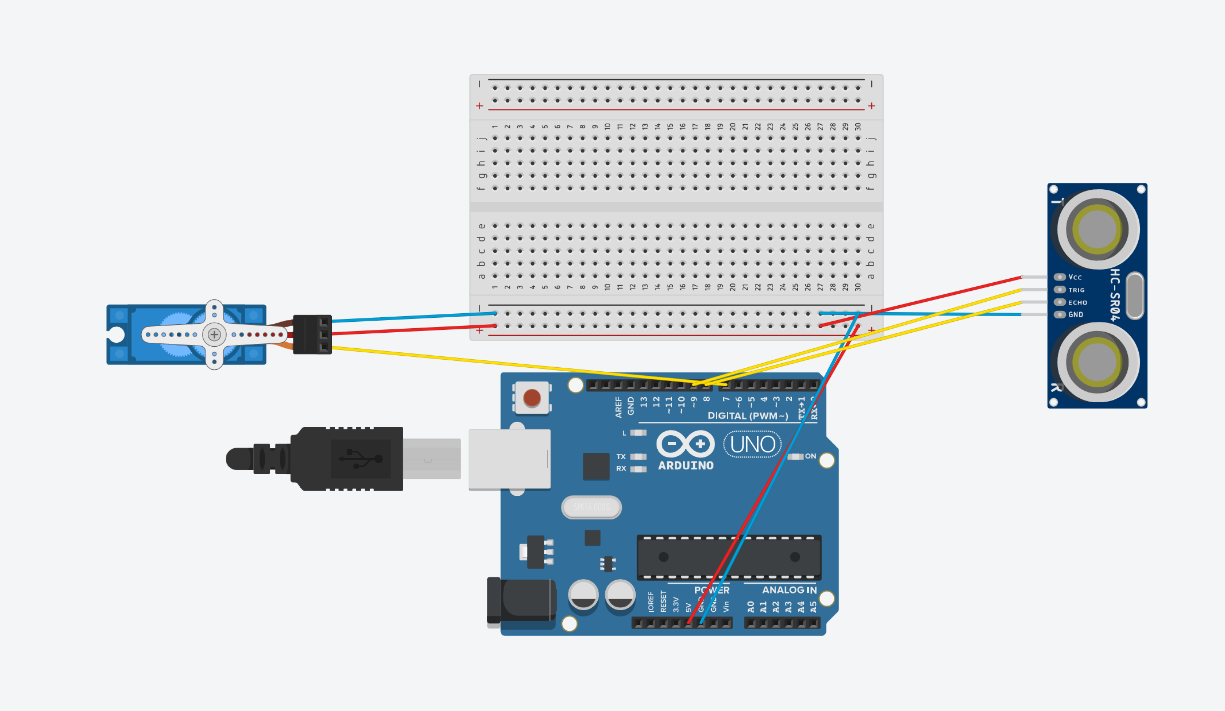
Ülesanne 7.1 Rahakarp või Prügikast.
Komponendid:
- 1 arduino plaat
- 1 Micro servo
- 1 Distance sensor
- 9 juhet
https://www.tinkercad.com/things/5j5KXttNpuu-bodacious-fyyran
#define trigPin 9
#define echoPin 8
#define servopin 7
#define chewing 1
#define blizost 10
#define mouthClose 90
#define mouthOpen 30
#define mouthAjar 70
#include
Servo Sergo;
void setup() {
Serial.begin(9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Sergo.attach(servopin);
sleep();
}
void loop() {
int duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = duration / 58;
Serial.print(distance);
Serial.println(» cm»);
if (distance < blizost) {
eat();
}
delay(100);
}
void eat() {
Sergo.attach(servopin);
delay(200);
Sergo.write(mouthOpen);
delay(700);
for (int x = 0; x < chewing; x++) {
Sergo.write(mouthAjar);
delay(250);
Sergo.write(mouthOpen);
delay(250);
Serial.println("nyam");
}
sleep();
}
void sleep(){
Sergo.write(mouthClose);
delay(250);
Sergo.detach();
}
Tööpõhimõte:
See on hoiupõrsas, mis töötab tänu sensorile, mis näeb enda ees olevat objekti ja saadab signaali luugi avavale mootorile.
kasutamisvõimalused tavaelus.
Neid kasutatakse õhu-, mere- ja maaobjektide tuvastussüsteemideks, samuti nende ulatuse, kiiruse ja geomeetriliste parameetrite määramiseks.